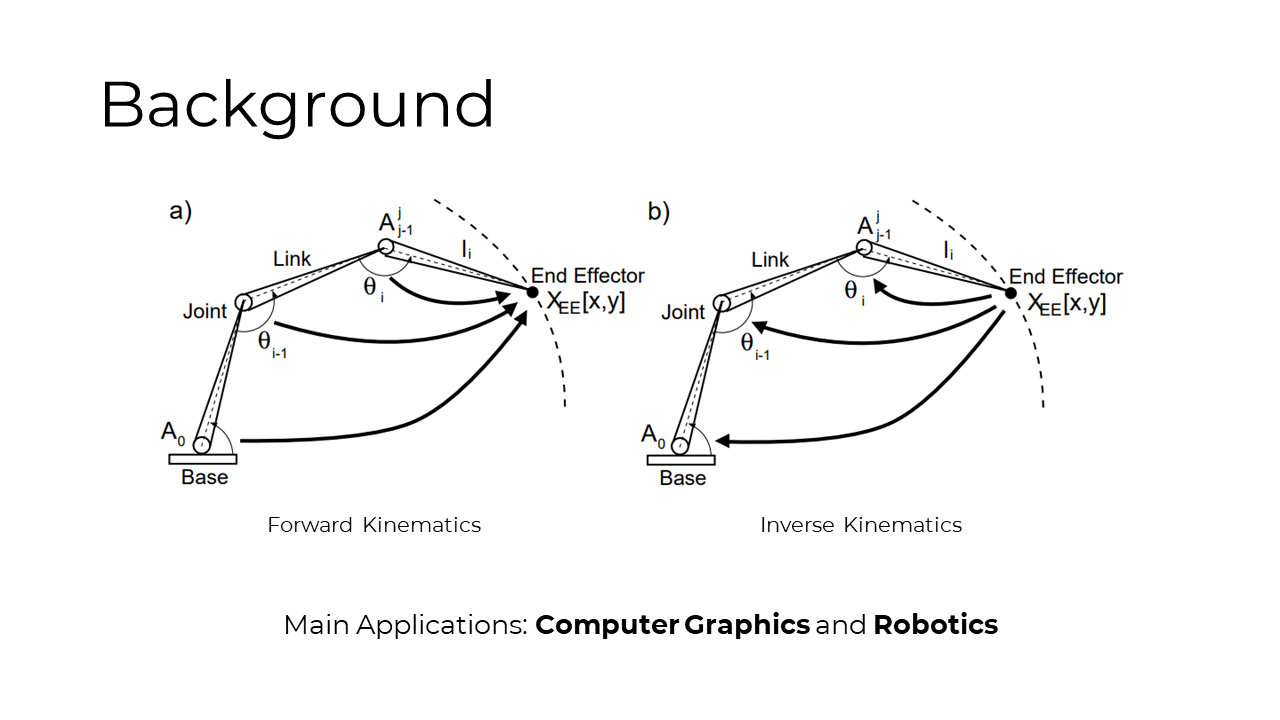
Inverse Kinematics as an Optimization Problem
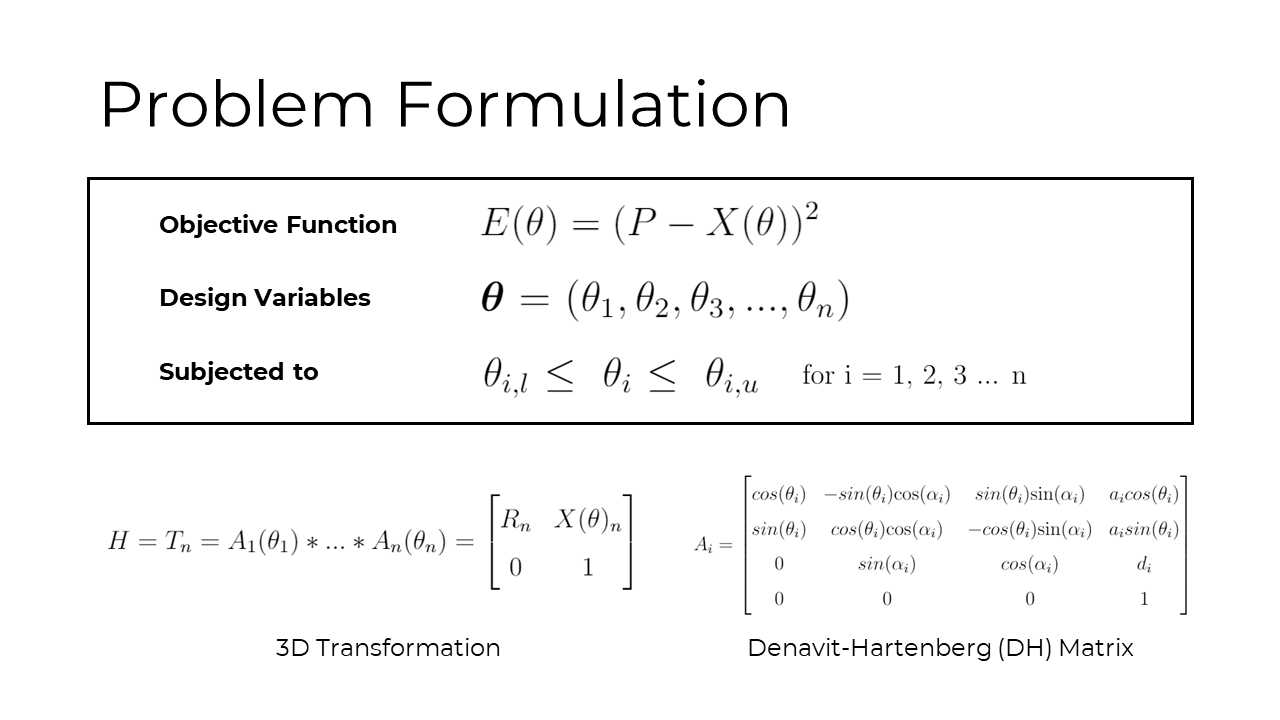
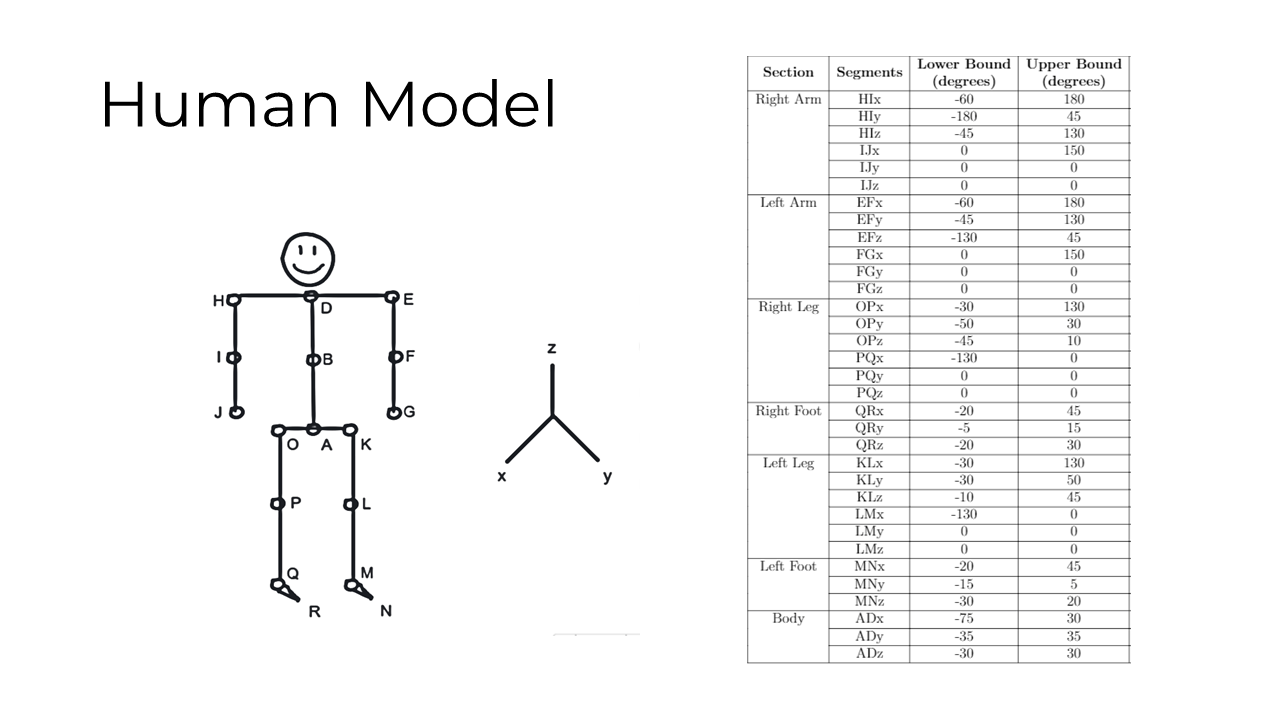
Inverse kinematics has important applications in the field of computer graphics and robotics. The goal of this project is to understand IK as an optimization problem, and evaluate some of the numerical techniques used to solve the problem. IK system can be treated as an optimization problem by minimizing the distance error between the current and desired end effector positions. To calculate the current position, the Denavit-Hartenberg (DH) model is used for easier implementation (in MATLAB). A basic human rig is used in this project as the system to optimize for. Three optimization techniques were investigated, specifically the Interior Point method, the Quasi-Newton method, and the Cyclic Coordinate Descent method. Two animations were generated to analyze the visual result and computational performance of each method.
Overview
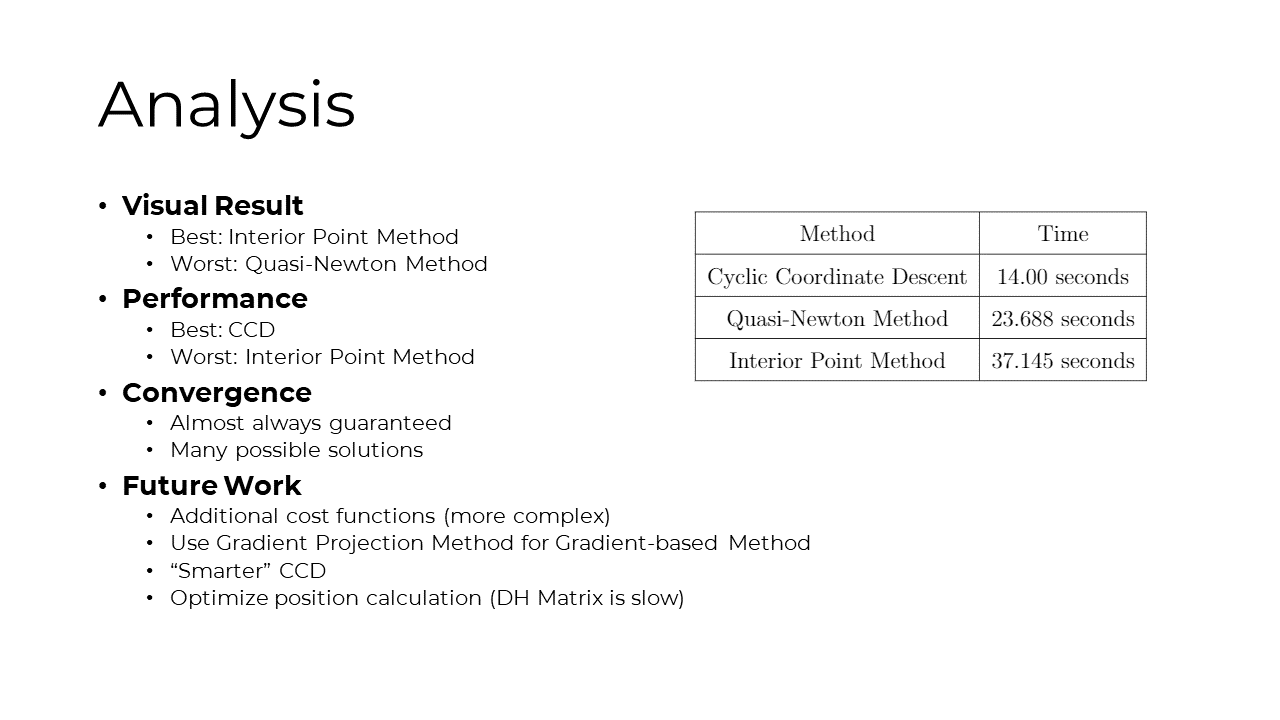
Computationally, the interior point method is the slowest and fails to compute for large DOF. Quasi-Newton scales exponentially to the number of DOF, while CCD scales linearly. It is important to emphasize that none of the techniques has been optimized for IK system. The calculation of the current position using forward kinematics can also be drastically improved by using an alternative model to DH.